作为国内领先的工业总线产品专家,每一款产品都是根据市场的需求及用户痛点而开发;十年来应用场景深度探索,助力实际应用的效能提升;严苛的元器件选用,只为竭尽所能提升国产替代过程中的用户体验,坚守高性能、高可靠性的原则,打造国产精品。
查看更多138-6173-3648
发布时间:2024/11/29
作者:无锡凌科自动化技术有限公司
所属分类:公司新闻
ES-04DMA脉冲定位模块在上下料中的应用

01 行业背景
丨实现高精度定位控制
脉冲定位模块能够实现高精度的位置控制,这在大载重上下料中至关重要。在搬运重型机械零部件的场景中,例如大型机床的床身部件,其重量可能达到数吨甚至数十吨。脉冲定位模块通过精确控制电机的脉冲数来驱动运输设备(如行车、自动导引车等),可以将位置精度控制在毫米级别。原理是根据电机的步距角和脉冲数的关系来确定位移。例如,一个步距角为 1.8° 的电机,每接收 200 个脉冲旋转一圈。如果驱动轮的周长是 1 米,那么每个脉冲对应的位移就是 1 米 / 200 = 5 毫米。这样就可以根据需要搬运的距离准确地发送脉冲信号,使重物精确地到达上下料位置
丨负载适应性强
大载重的物料搬运往往会对定位系统产生较大的冲击和负载变化。脉冲定位模块具有良好的负载适应性。在建筑行业,当搬运大型预制混凝土梁(重达几十吨)进行上下料时,脉冲定位模块可以根据负载的变化自动调整电机的驱动扭矩。它通过电流反馈等机制,当检测到电机负载增大(如在启动或遇到障碍物时),增加脉冲信号的强度来提供足够的动力,确保重物能够按照预定的位置和速度进行搬运。并且在负载变化过程中,依然能够保持较高的定位精度,不会因为负载的波动而导致位置偏差过大
丨与自动化系统集成
脉冲定位模块能够很方便地与自动化控制系统集成,实现大载重上下料的自动化流程。在自动化仓库中,对于重型货物的存储和取出操作,脉冲定位模块可以接收来自仓库管理系统(WMS)的指令。当需要取出一个位于高层货架的重型货物(如大型电机设备)时,WMS 发送货物的位置坐标信息给脉冲定位模块,模块根据坐标计算出电机所需的脉冲数,驱动堆垛机准确地到达货物位置,完成下料操作。同时,在进料时,也能按照预设的存储位置信息将重物精准地上料放置到相应的货架位置,提高了仓库空间的利用率和货物出入库的效率
多轴协同定位
在一些复杂的大载重上下料设备中,如具有多个自由度的工业机器人手臂用于搬运大型锻造件,脉冲定位模块可以实现多轴协同定位。每个关节电机都有相应的脉冲定位控制。以六轴机器人为例,当搬运一个大型航空发动机部件进行上下料时,脉冲定位模块会同时控制六个关节电机的脉冲信号。通过运动学模型和逆运动学算法,根据目标位置和姿态,精确地计算每个关节电机所需的脉冲数,使机器人手臂能够灵活、精准地将重物放置在指定的上下料位置,实现复杂空间中的精确定位操作
丨负载适应性强
大载重的物料搬运往往会对定位系统产生较大的冲击和负载变化。脉冲定位模块具有良好的负载适应性。在建筑行业,当搬运大型预制混凝土梁(重达几十吨)进行上下料时,脉冲定位模块可以根据负载的变化自动调整电机的驱动扭矩。它通过电流反馈等机制,当检测到电机负载增大(如在启动或遇到障碍物时),增加脉冲信号的强度来提供足够的动力,确保重物能够按照预定的位置和速度进行搬运。并且在负载变化过程中,依然能够保持较高的定位精度,不会因为负载的波动而导致位置偏差过大。
丨速度和位置的精准调节
脉冲定位模块不仅可以控制位置,还能精准调节运动速度。在大载重上下料过程中,根据不同的工况和安全要求,需要合理控制重物的搬运速度。例如,在化工企业中,当搬运大型反应釜(重量大且内部可能含有危险化学品)进行上下料时,在反应釜接近目标位置时,脉冲定位模块可以逐渐降低脉冲频率。这样就能够使运输设备(如行车)缓慢、平稳地将反应釜放置到指定位置,避免因速度过快而产生碰撞,确保上下料过程的安全和准确。同时,在空载返回等情况时,又可以提高脉冲频率,加快设备的运行速度,提高工作效率
02 现场应用图片


03 ES-04DMA功能简介
● 支持4通道NPN高速脉冲输出,最高输出脉冲频率:200k/轴
● 可接入16通道NPN 数字量输入,8个NPN 数字量输出。
● 位置控制/速度→位置切换控制
● 原点回零(近点狗式)
● 点动功能(JOG)
● 递增与绝对定位切换
● 支持S型和T型曲线加减速,实现速度方面的精细变化,确保加减速平稳
● 可以按照外部设备的需求修改I/O的逻辑
● 支持快速启动,在位置控制起动时每个轴起动时间缩短到1ms,多轴同时启动时没有启动延时
● 模块可适配PROFINET,ETHERNET/IP,CC-Link IE FB,ETHERCAT,MODBUS TCP的耦合器,与西门子,三菱,欧姆龙等各大主流国内外PLC品牌适配。
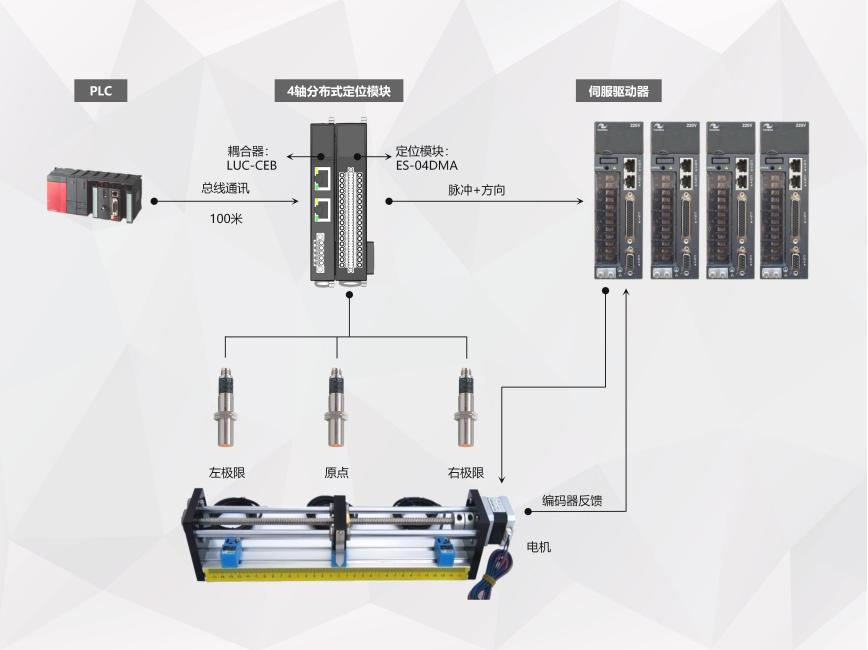
04 应用拓扑图
05 产品实物图

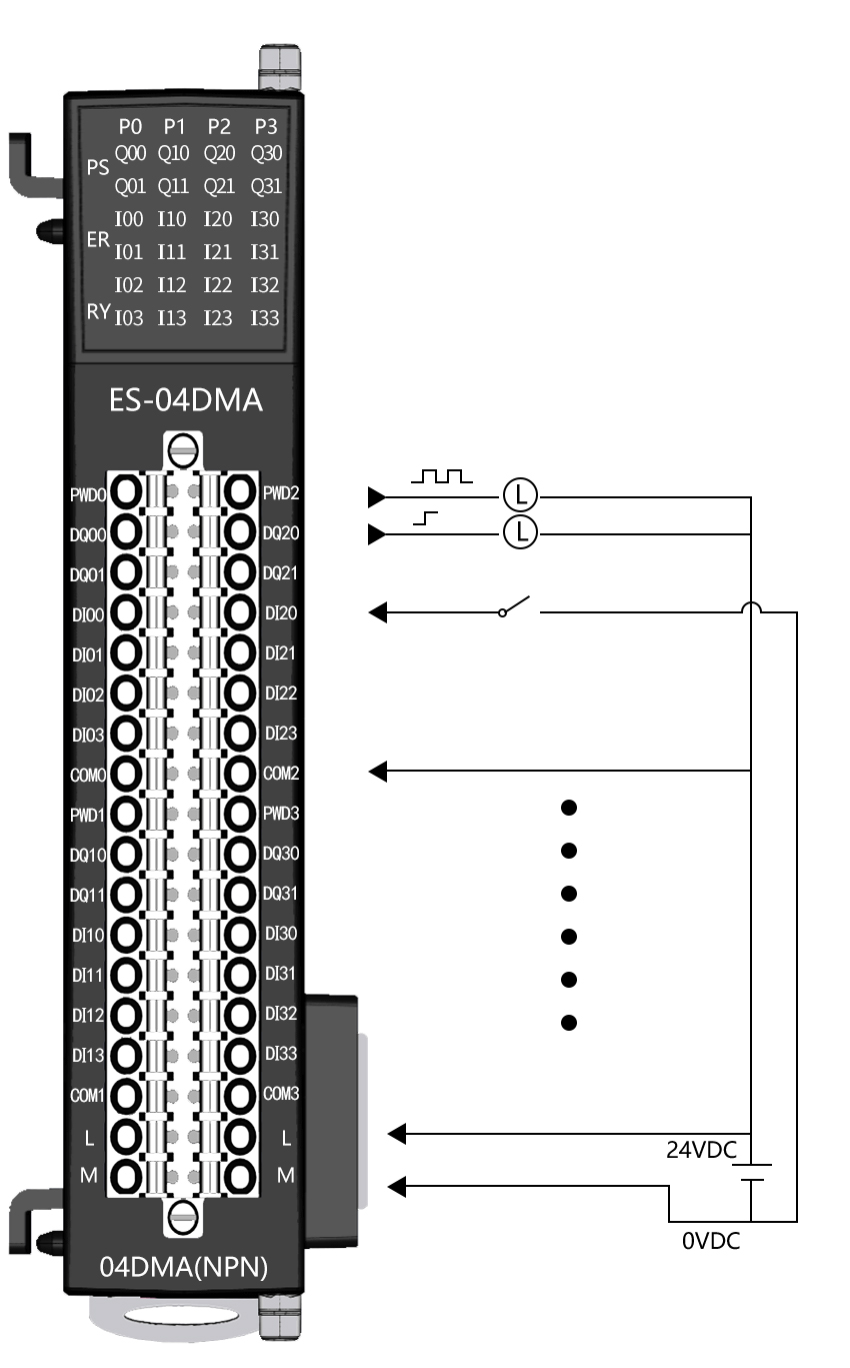
06 接线图
07 设置步骤解析(西门子博图软件为例)
第一步:硬件连接正确连接
S7-1200PLC与远程IO模块电源,将测试对象PLC的网口, 通过网线插入到远程IO模块的X1口, 后将远程IO模块的X2 口通过网线接入到调试电脑网口上。

第二步:建立示例工程
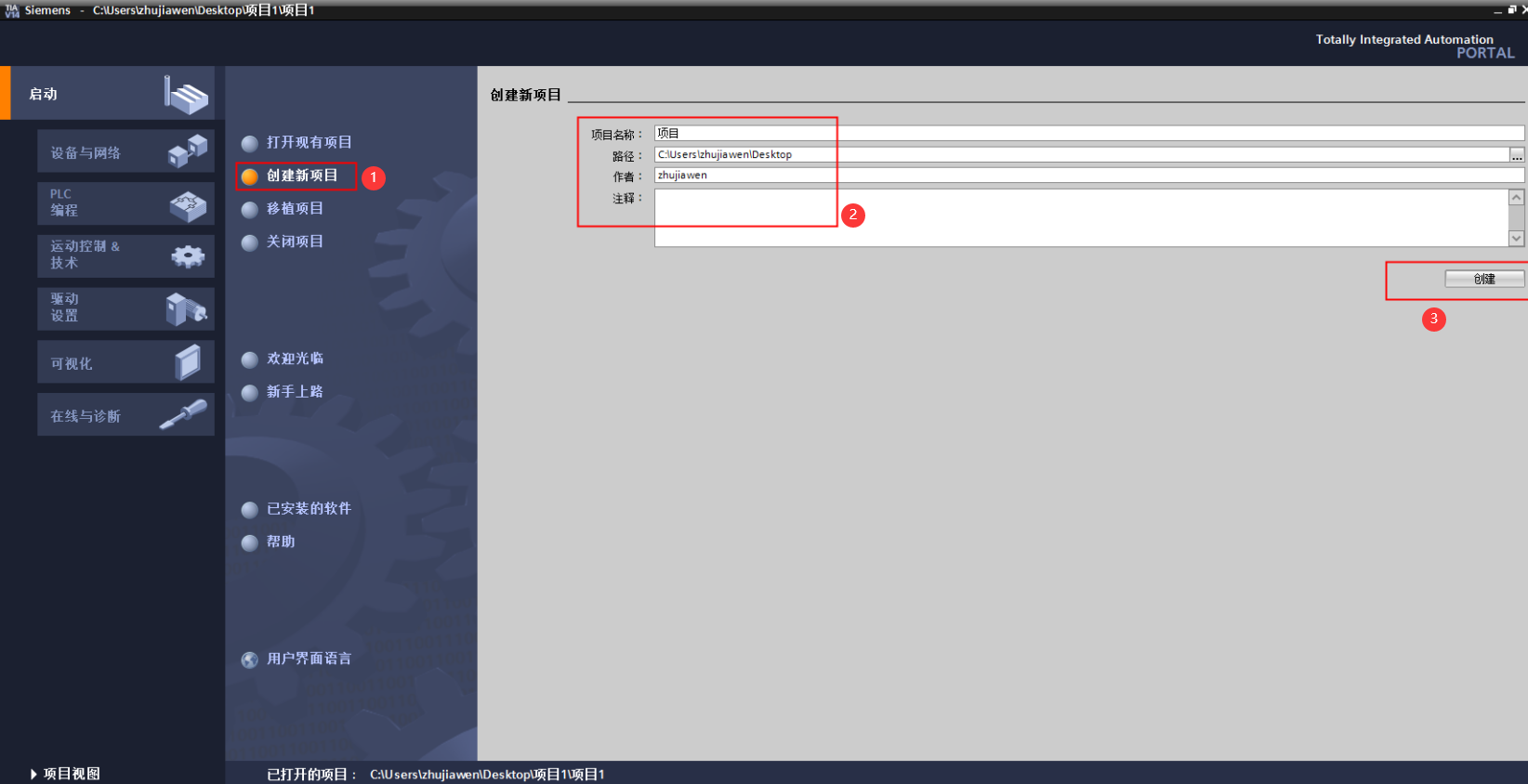
新建工程打开 TIA Portal 软件,选择“创建新项目”,并填写项目名称、路径、版本、作者等相关信息,点击创建:
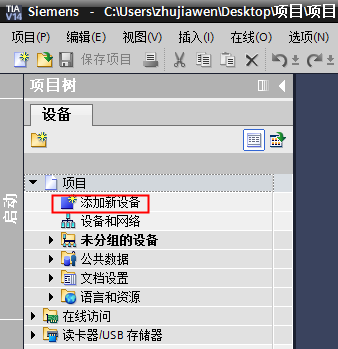
CPU的添加与连接。点击界面左边的“项目”,出现下级目录,并双击“添加新设备”:
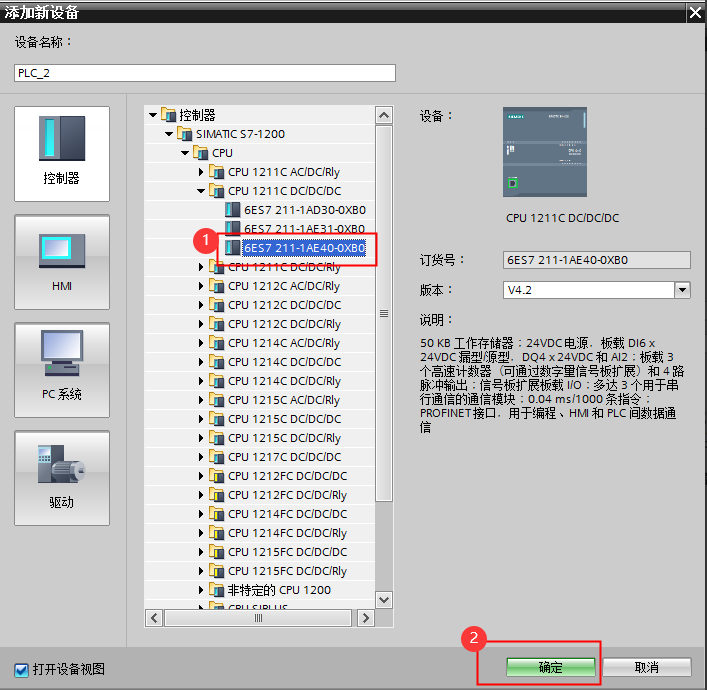
弹出“添加新设备” 窗口,进行“控制器/SIMATIC S7-1200/CPU→CPU 1211C DC/DC/DC→6ES7 211-1AE40-0XB0” 操作,点击确定:
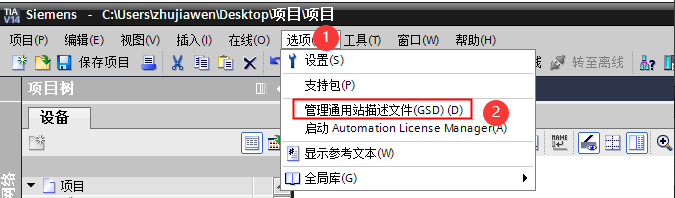
添加凌科LUC-PN的管理通用站描述文件。点击菜单栏的“选项” 按钮, 选择“管理通用站描述文件(GSD)”:
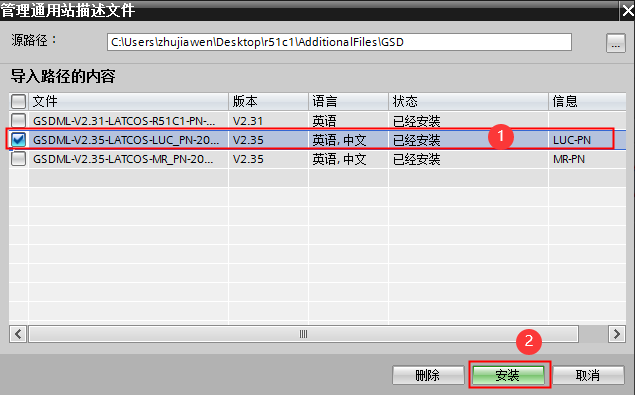
选择源路径(准备阶段存放的位置),勾选文件夹,点击“安装”即可:
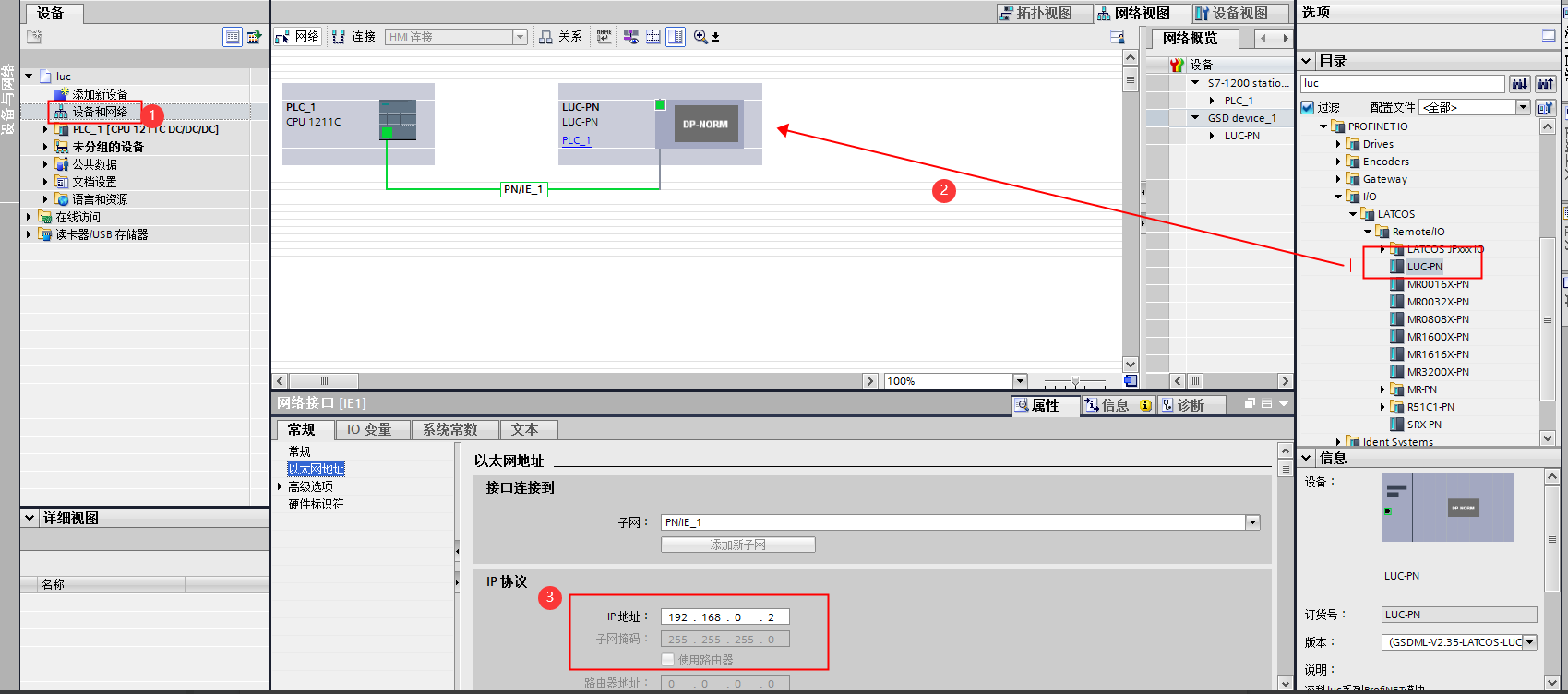
添加LUC-PN模块。选择中间界面的“网络视图”,在右侧硬件目录找到“LUC-PN” 拖拽到左侧网络视图,并设置IP地址:
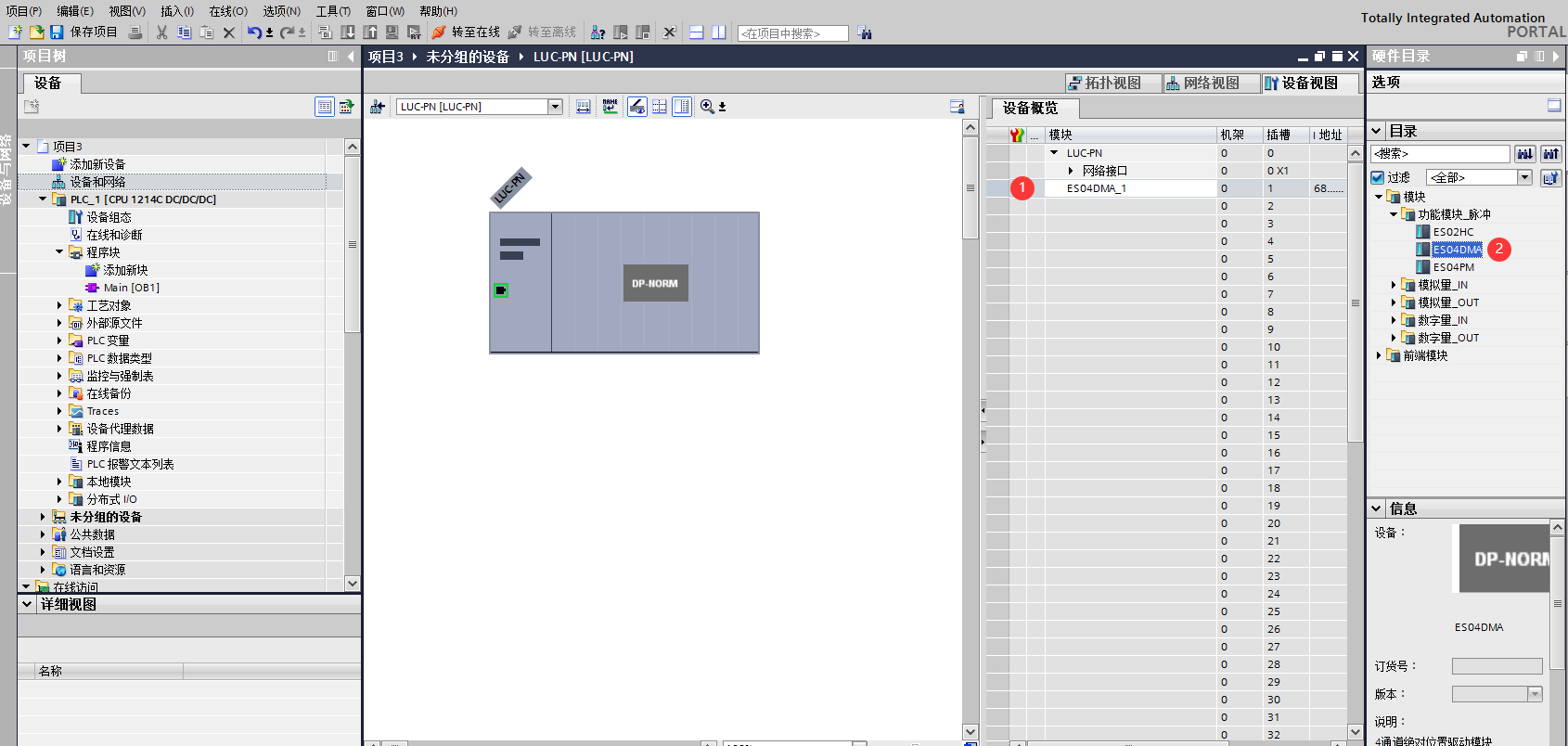
添加ES-04DMA硬件。双击后TIA Portal软件右上角区域会出现LUC-PN扩展模块的信息。先选中插槽1,再选择“功能模块_脉冲”再双击ES04DMA。
第三步:ES-04DMA属性设置
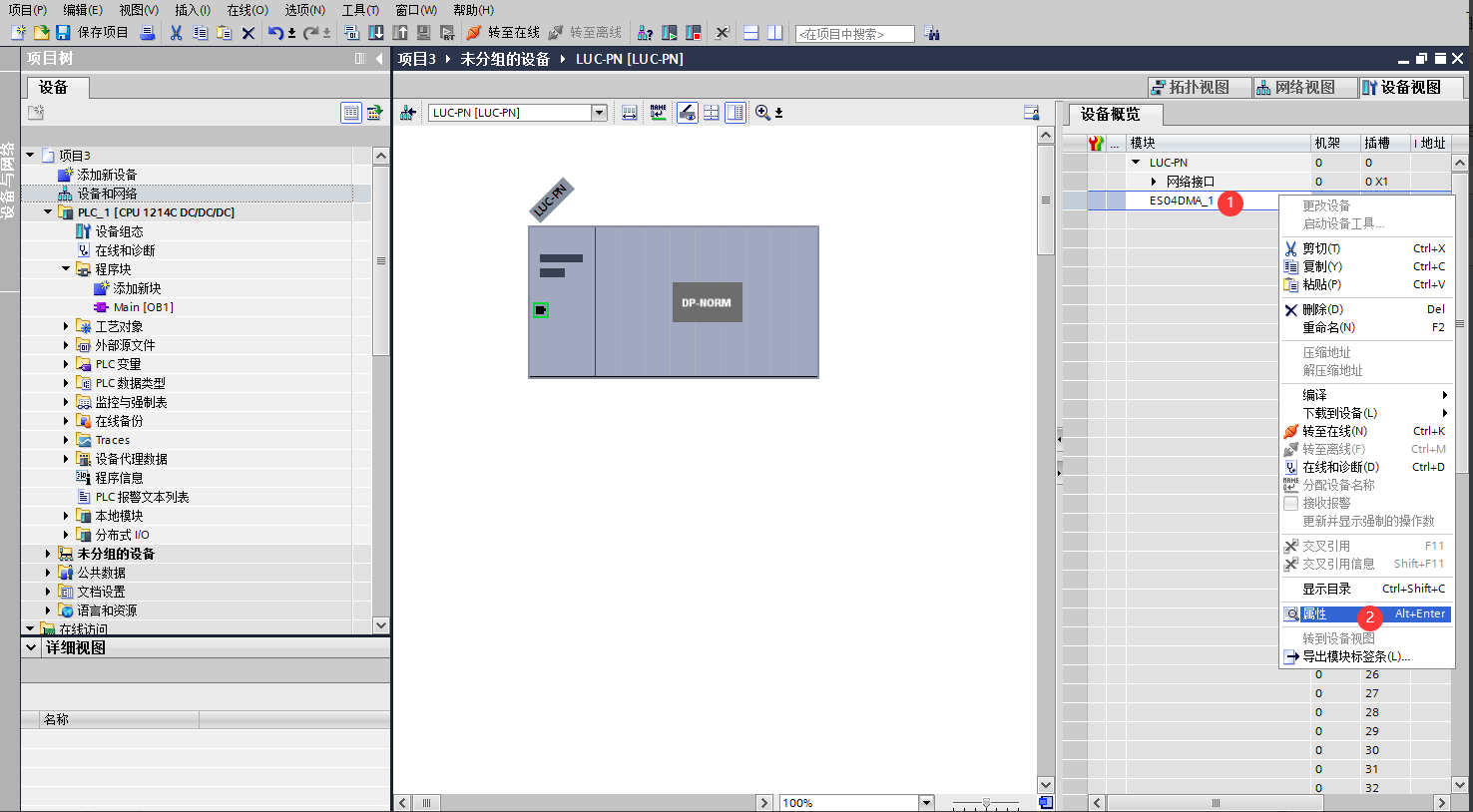
选中插槽1的ES04DMA,右击选择属性,系统会跳出ES04DMA的属性对话框
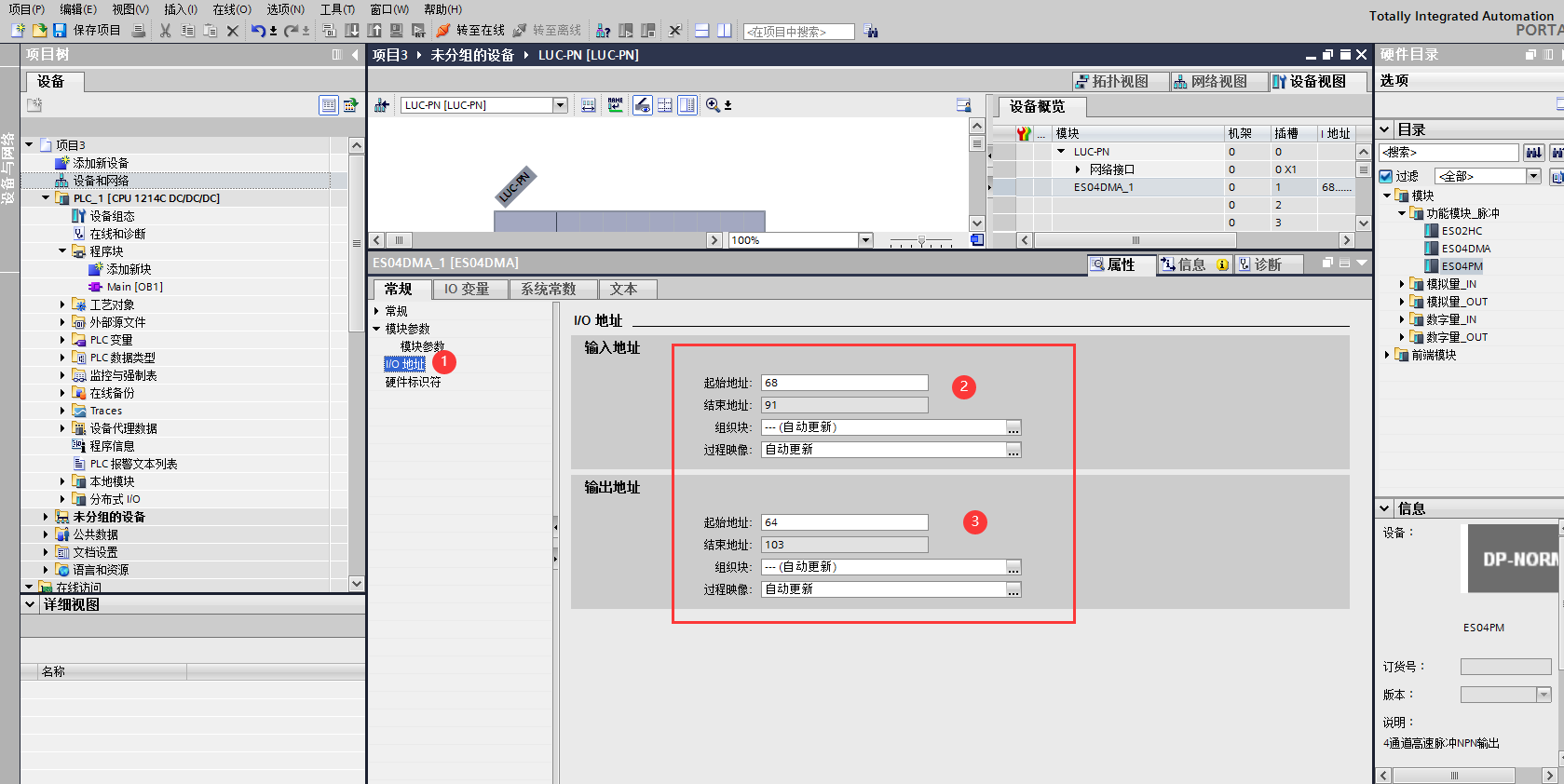
I/O地址设置。选中常规中的I/O地址,红色区域中显示了输入地址的起始地址:68,结束地址91,表示输入地址从I68.0~I91.7;输出地址的起始地址:64,结束地址103;表示输出地址从Q64.0~Q103.7。这个地址为模块默认地址,我们这里不做修改
第四步:ES-04DMA内部模块参数设置
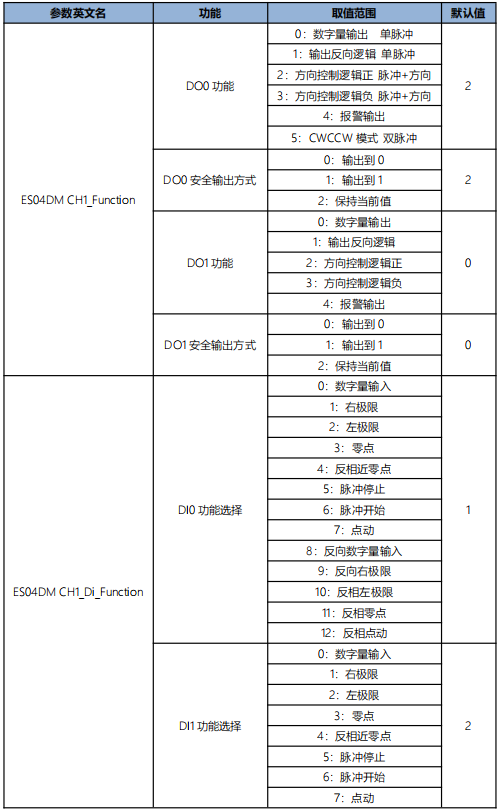
选中常规中的模块参数,红色区域中显示了通道一的参数
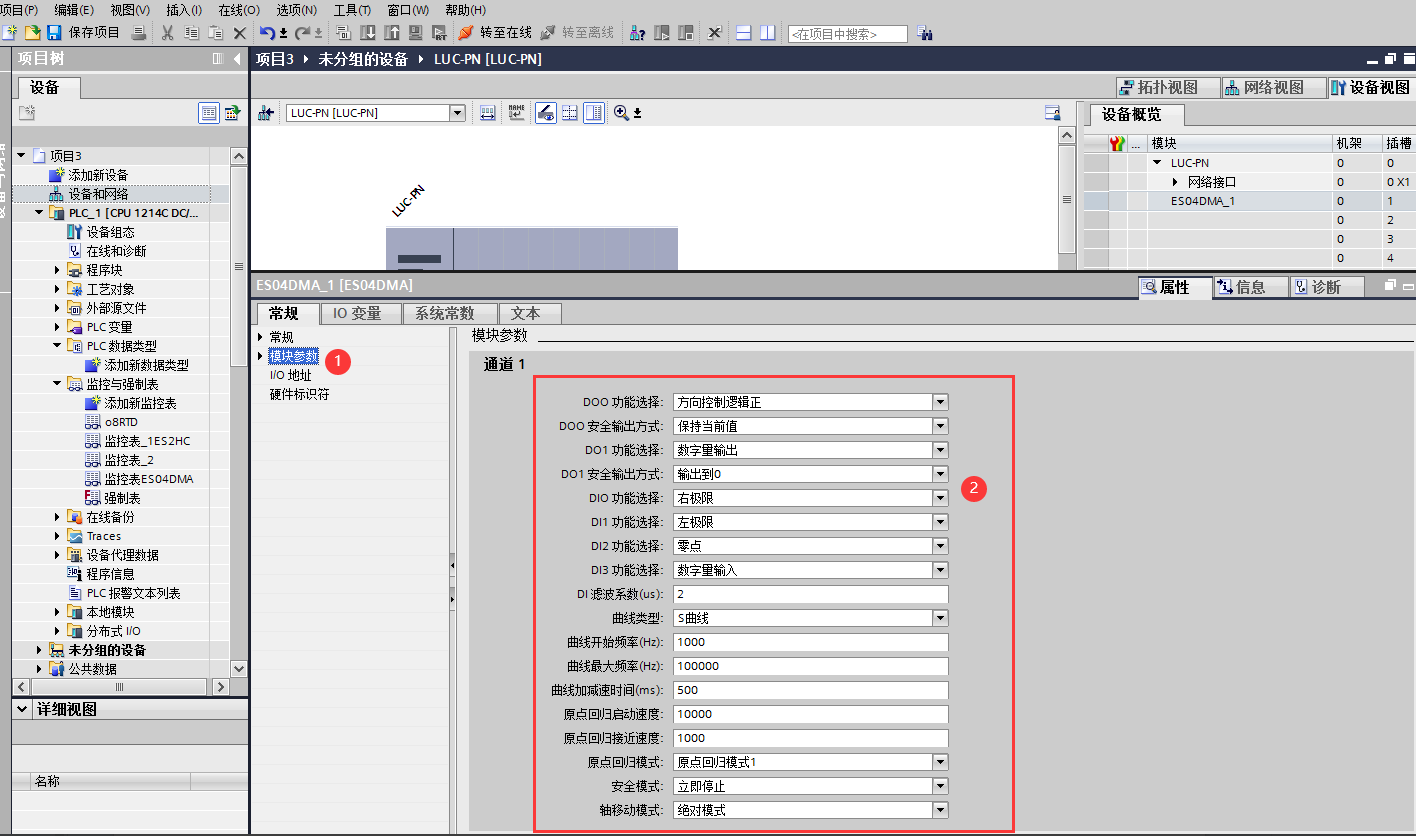
参数默认状态:
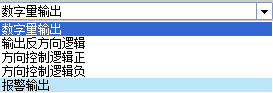
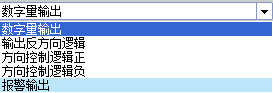
参数1:DO0功能选择,默认为方向控制逻辑正
参数2:DO0安全输出方式,默认输出到0
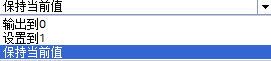
参数3:DO1功能选择,默认为数字量输出
参数4、DO1安全输出方式,默认为输出到0
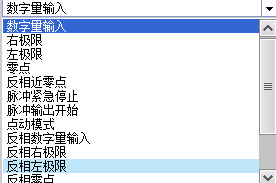
参数5:DI0功能选择,默认为右极限

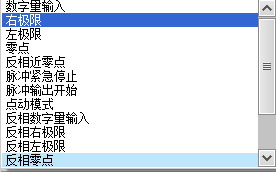
参数6:DI1功能选择,默认为左极限
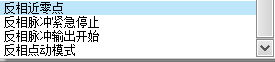
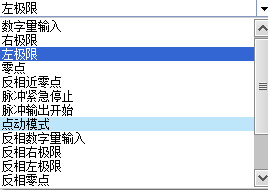
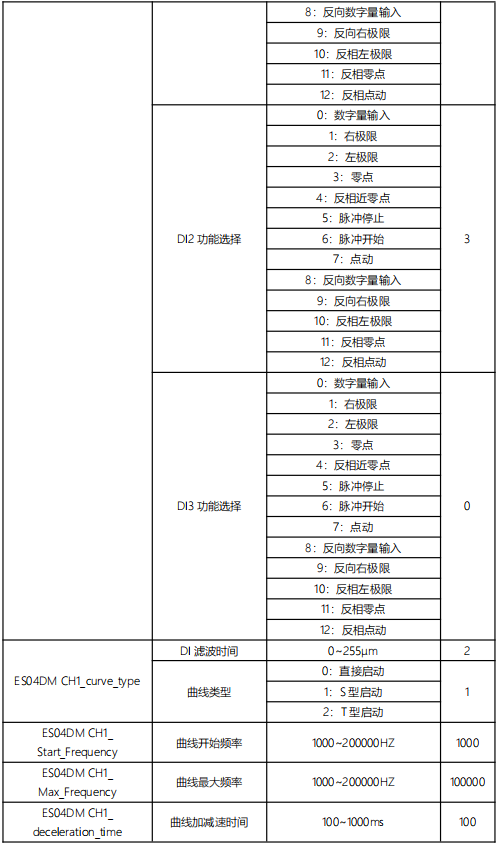
参数7:DI2功能选择,默认为零点

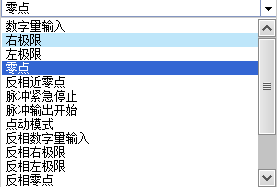
参数8:DI3功能选择,默认为数字量输入
参数9:DI滤波系数,默认为2

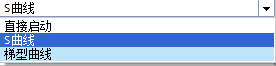
参数10:曲线类型,默认为S曲线
参数11:曲线类型开始频率,默认为1000HZ

参数12:曲线类型最大频率,默认为100000HZ

参数13:曲线加减速时间,默认为500ms

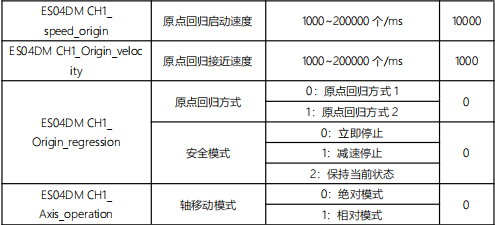
参数14:原点回归启动速度,默认为10000脉冲

参数15:原点回归接近速度,默认1000脉冲

参数16:原地回归模式,默认为原点回归模式1

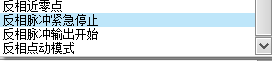
参数17:安全模式,默认为立即停止

参数18:轴移动模式,默认为绝对模式
配置参数定义:
第五步:创建ES-04DMA的地址监控表
根据I/O的输出地址从Q68.0~Q91.7,创建如下监控表,设置如下控制字/位


根据I/O的输入地址I68.0~I91.7,创建如下输入监控表,设置如下状态字/位


说明:通道二、三、四参考通道一即可。控制字/位相邻通道相差10个字,如通道一运行目标位置:QD64,通道二运行目标位置:QD74,通道三运行目标位置:QD84,通道四运行目标位置:QD94。
状态字/位相邻通道相差6个字,如通道一当前位置:ID68,通道二当前位置:ID74,通道三当前位置:ID80,通道四当前位置:ID86。
第六步:设置PROFINET通讯参数
先在模块的未分配上左击鼠标,选择PLC_1.PEOFINET 接口_1,即可将LUC-PN的模块连入PROFINET网络中


设置项目中的S7-1200的IP地址及分配LUC-PN的IP地址和设备名称。选中网口,右击属性,在以太网地址中设定IP地址。

确认和修改远程IO设置设备名称方式,通过网络视图的模块直接分配设备名称

选择正确的网卡,然后更新列表

根据MAC码选择相应的模块分配设备名称,设置后 PLC 上电时会根据网络中的设备分配名称分配 IP 地址,务必要保证硬件设备名称与软件的设备名称要一致

程序编译下载,在项目树中,选中需要下载的项目文件夹,然后执行菜单命令"在线〉下载到设备"或直接点击工具栏上的图标"下载到设备

如果需要下载修改过的硬件组态且CPU处于运行模式时,需要把CPU转为停止模式.


下载中心
产品手册、配置文件、选型手册
定制行业解决方案
138-6173-3648
技术支持
提供7*24h
销售微信

技术微信